ソフトロボットの触り心地制御に向けた伸縮性のある静電触覚サーフェースの開発
A Stretchable Electrostatic Tactile Surface
2021
高柳直歩,松久直司,橋本悠希,杉浦裕太
Naoto Takayanagi, Naoji Matsuhisa, Yuki Hashimoto, Yuta Sugiura
[引用はこちら/Reference]
Naoto Takayanagi, Naoji Matsuhisa, Yuki Hashimoto, Yuta Sugiura, A Stretchable Electrostatic Tactile Surface, arXiv:2410.04768. [DOI]
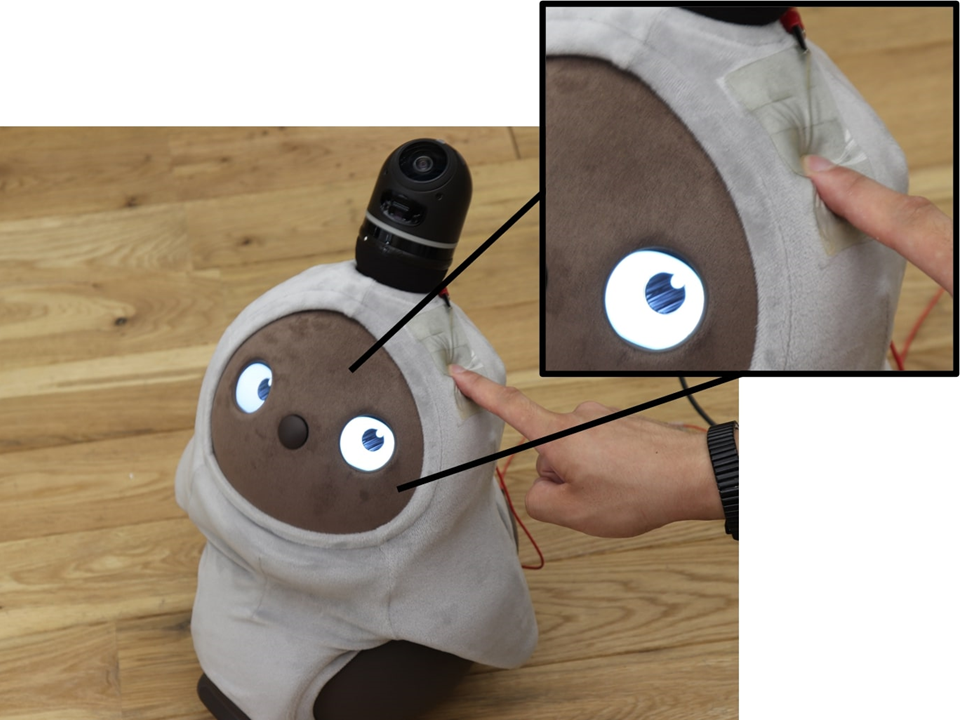
ソフトロボットの触感を制御するために、透明な伸縮電極と伸縮絶縁層からなる伸縮静電触覚面を提案する。この表面は50%の歪みまで伸縮可能であるため、ソフトロボットの可動部表面に貼り付けけられる。また、十分な透明性を有しているため、外観をほとんど損なわない。本研究では表面の形状、伸縮状態、手との接触面積の条件を変えて、知覚可能な電圧の下限を調査した。
In this work, we present a stretchable electrostatic tactile surface consisting of a transparent stretchable electrode and a stretchable insulating layer for controlling the tactile sensation of a soft robot. This surface can be stretched up to a 50% strain, so it can be attached to the surface of a moving part of a soft robot. In addition, it is sufficiently transparent that its appearance is virtually unimpaired. We investigate the lower perceptible voltage limit under different conditions of the surface configuration, stretch state, and contact area with the hand.