薄くて伸縮性のある皮膚のようなインタフェース
A thin stretchable interface for tangential force measurement
2011
杉浦裕太,稲見昌彦,五十嵐健夫
Yuta Sugiura, Masahiko Inami, and Takeo Igarashi
[Reference /引用はこちら]
Yuta Sugiura, Masahiko Inami, and Takeo Igarashi, A thin stretchable interface for tangential force measurement, In Proceedings of the 25th annual ACM symposium on User interface software and technology (UIST ’12), ACM, 529-536, October 7-10, 2012, Cambridge, MA, USA. [DOI]
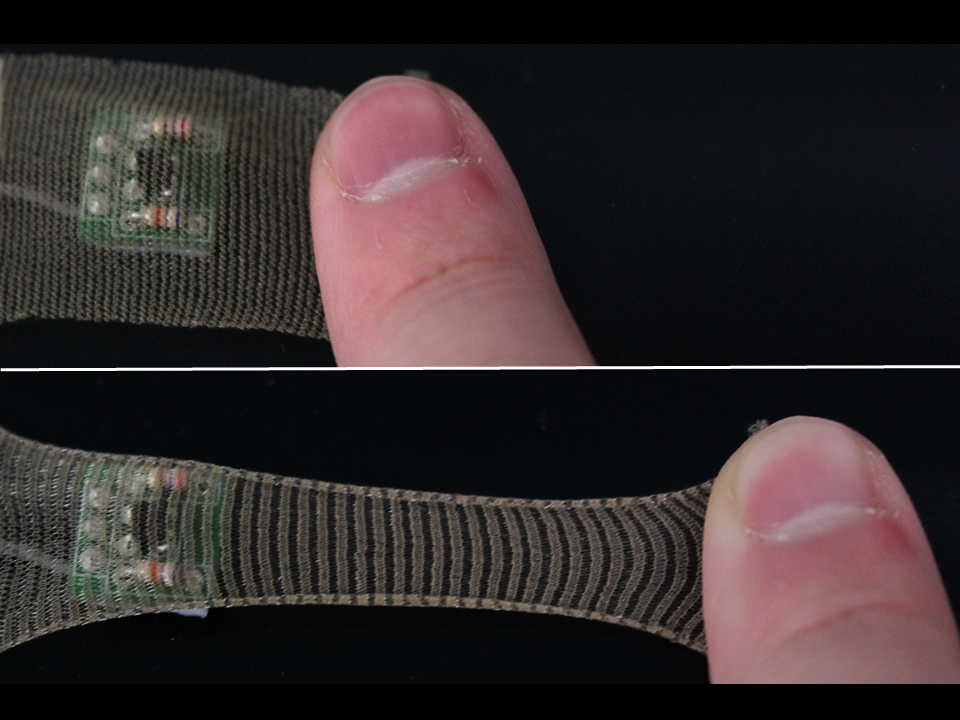
薄くて伸縮性のある皮膚のようなインタフェースを提案する。これはフォトリフレクタと伸縮性を備えた布で構成される。布に光を照射しながら伸縮させたときに、布の編み目の大きさに伴い光の透過率が変わるため反射率も変化する。この反射光をセンサで捉えることで伸縮率を計測できる。本手法は、布にセンサを接近させるだけで実現できるため、(1)これらを接着する必要がなく布の柔軟性を損なわない、(2)貼付ける対象に合わせてセンサの個数やインタフェースの面積を変更できる、(3)センサが小型で薄さを保つことができる、という特徴がある。
We have developed a simple skin-like user interface that can be easily attached to curved as well as flat surfaces and used to measure tangential force generated by pinching and dragging interactions. The interface consists of several photoreflectors that consist of an IR LED and a phototransistor and elastic fabric such as stocking and rubber membrane. The sensing method used is based on our observation that photoreflectors can be used to measure the ratio of expansion and contraction of a stocking using the changes in transmissivity of IR light passing through the stocking. Since a stocking is thin, stretchable, and nearly transparent, it can be easily attached to various types of objects such as mobile devices, robots, and different parts of the body as well as to various types of conventional pressure sensors without altering the original shape of the object. It can also present natural haptic feedback in accordance with the amount of force exerted. A system using several such sensors can determine the direction of a two-dimensional force. A variety of example applications illustrated the utility of this sensing system.