光センサを用いた手の甲の変形計測によるジェスチャ推定手法
Hand Gesture Recognition through Measuring Skin Deformation on Back Hand by Optical Sensors
2017
杉浦裕太,中村文彦,河合航,菊地高史,杉本麻樹
Yuta Sugiura, Fumihiko Nakamura, Wataru Tawai, Takashi Kikuchi, and Maki Sugimoto
[Reference /引用はこちら]
Yuta Sugiura, Fumihiko Nakamura, Wataru Tawai, Takashi Kikuchi, and Maki Sugimoto, Behind The Palm: Hand Gesture Recognition through Measuring Skin Deformation on Back Hand by Optical Sensors, SICE Annual Conference 2017 (SICE ’17), IEEE, 1082-1087, September 19-22, 2017, Kanazawa, Japan. [DOI]
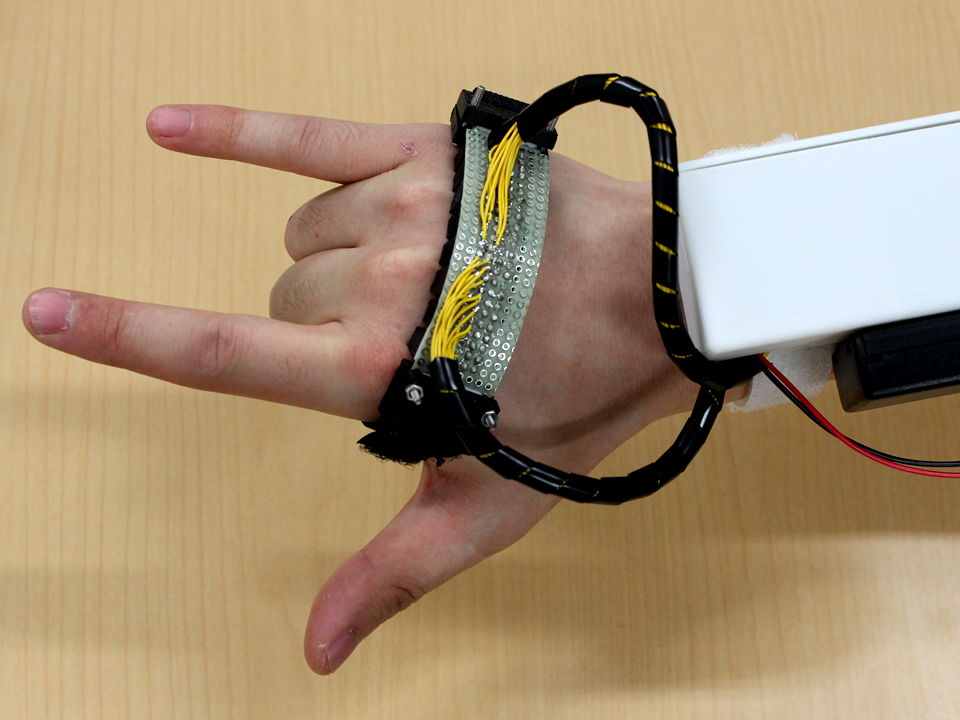
本研究では、手の甲の皮膚変形を計測することで、ハンドジェスチャを認識する手法を提案する。手の甲の変形の計測にはいくつかの反射型光センサを利用する。この光センサをアレイ状に並べた装着型デバイスを開発した。装置と皮膚までの距離をこの光センサで計測することで、手の甲の変形を取得できる。システムは、取得したセンサデータを用いてSupport Vector Machine (SVM)でハンドジェスチャを推定する。手の甲の変形を歪みゲージで計測してジェスチャを取得する方法はあるが、本研究はその手法と比べると耐久力もあり、また手に直接貼り付ける手間もなく優れている。
We propose a system consisting of a wearable device equipped with photo-reflective sensors arranged in an array. Hand gestures are recognized by measuring the skin deformation of the back of the hand. Since the muscles and bones on the back of the hand are linked to the fingers, finger movement can be clearly observed. Skin deformation is measured using several photo-reflective sensors. Skin deformation can be determined by measuring the distance between the device and skin with these sensors. The system estimates hand gestures with a support vector machine using the sensor data. Since this system simultaneously records the hand shape using Leap Motion in the learning phase, a user can freely register gestures. The system further displays a reconstructed digital hand as a gesture-recognition result.