指先の皮膚変形と姿勢の計測による接触力推定の検討
Estimation of Fingertip Contact Force by Measuring SkinDeformation and Posture with Photo-reflective Sensors

2018
齋藤彩音,久能若葉,河合航,宮田なつき,杉浦 裕太
Ayane Saito, Wakaba Kuno, Wataru Kawai, Natsuki Miyata, Yuta Sugiura
[Reference /引用はこちら]
Ayane Saito, Wakaba Kuno, Wataru Kawai, Natsuki Miyata, and Yuta Sugiura. 2019. Estimation of Fingertip Contact Force by Measuring Skin Deformation and Posture with Photo-reflective Sensors. In Proceedings of the 10th Augmented Human International Conference 2019 (AH2019). ACM, New York, NY, USA, Article 2, 6 pages. [DOI]
Estimation of Fingertip Contact Force by Measuring Skin Deformation and Posture with Photo-reflective Sensors (AH 2019 Full Paper) from sugiuralab
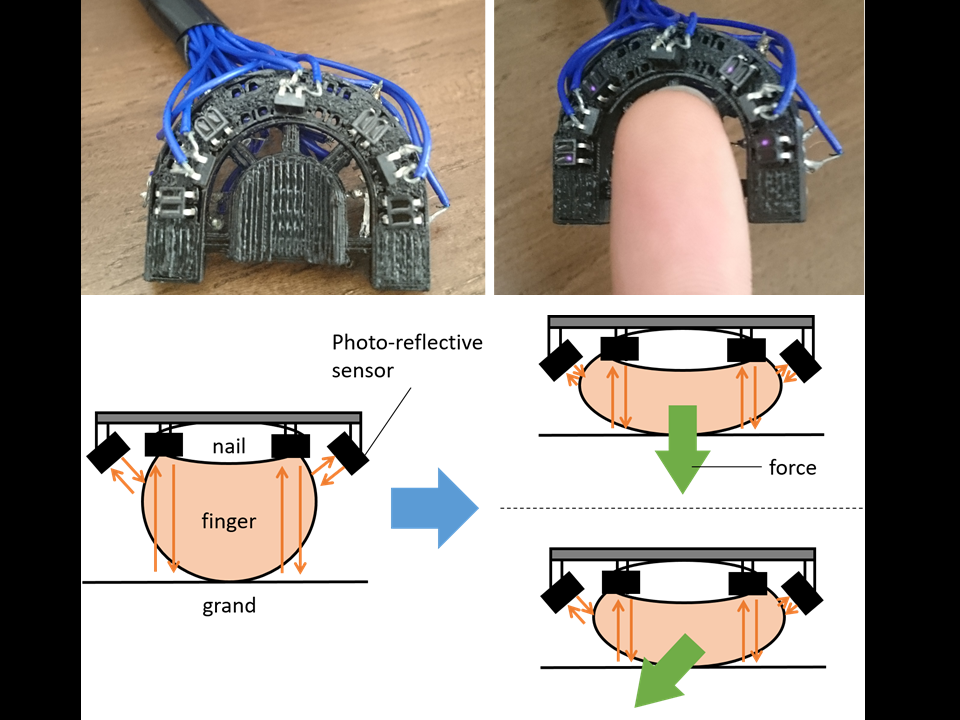
本研究は,指と対象物の間の接触面にセンサを配置することなく,接触圧力を計測する装着型のデバイスを提案する.指の皮膚はそれが物体と接触して力が加わると変形する.特に指の側面部分の変形を反射型光センサで近接距離から計測することで,指の接触圧力を推定する.本研究ではさらに,指が物体に接触したときの接触面との距離を光センサで計測し,距離から指の姿勢情報を測定することにより,装置の接触力の推定精度を向上させる.この装置は,指先と物体の間の接地面にセンサを置かずに力を推定するため,触感を変化させることなく接触力を推定することができる.
A wearable device for measuring skin deformation of the fingertip—to obtain contact force when the finger touches an object—wasprototyped and experimentally evaluated. The device is attachedto the fingertip and uses multiple photo-reflective sensors (PRSs)to measures the distance from the PRSs to the side surface of thefingertip. The sensors do not touch the contact surface between thefingertip and the object; as a result, the contact force is obtainedwithout changing the user’s tactile sensation. In addition, the ac-curacy of estimated contact force was improved by determiningthe posture of the fingertip by measuring the distance between thefingertip and the contact surface. Based on the prototyped device,a system for estimating three-dimensional contact force on thefingertip was implemented.