赤外線距離センサによる皮膚表面の応力計測手法
adapting skin as a soft interface
2013
尾形正泰,杉浦裕太,牧野泰才,稲見昌彦,今井倫太
Masa Ogata, Yuta Sugiura, Yasutoshi Makino, Masahiko Inami, Michita Imai
[Reference /引用はこちら]
Masa Ogata, Yuta Sugiura, Yasutoshi Makino, Masahiko Inami, and Michita Imai, SenSkin: adapting skin as a soft interface, In Proceedings of the 26th annual ACM symposium on User interface software and technology (UIST ’13), ACM, 539-544, October 08 – 11, 2013, St Andrews, UK. [DOI]
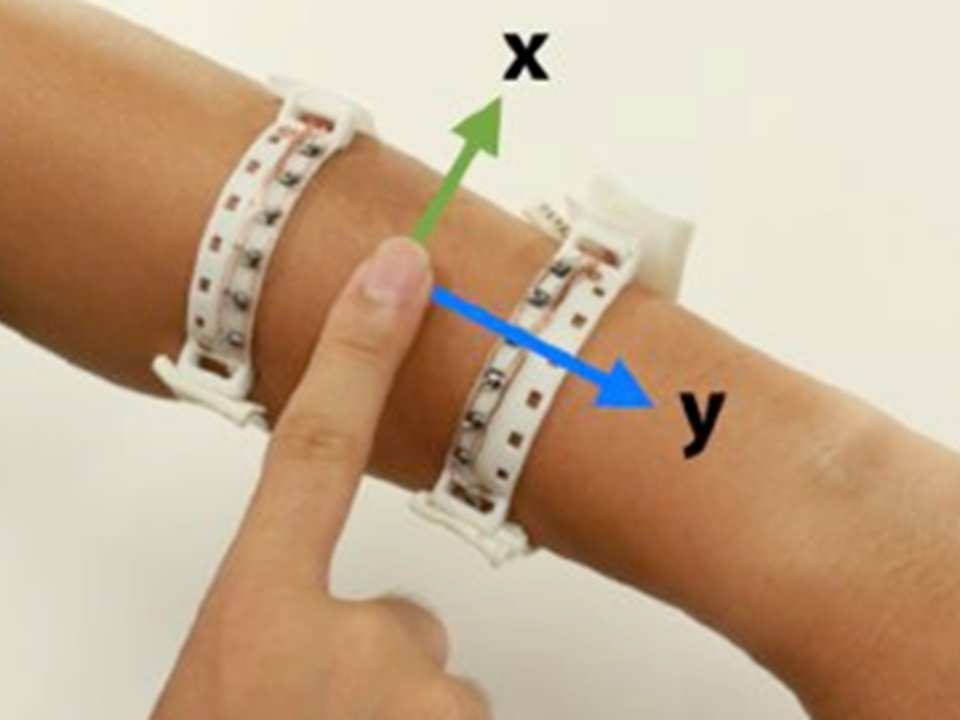
赤外線センサをバンドの皮膚側に設置し、皮膚とセンサの距離を計測します。距離の変化を赤外線の反射率として読み取ることで、皮膚の変形が分かるようになります。これにより皮膚をインタフェース化して、ウェアラブルな入力方式のための「皮膚ジェスチャ」を実現します。
We present a sensing technology and input method that uses skin deformation estimated through a thin band-type device attached to the human body, the appearance of which seems socially acceptable in daily life. An input interface usually requires feedback. SenSkin provides tactile feedback that enables users to know which part of the skin they are touching in order to issue commands. The user, having found an acceptable area before beginning the input operation, can continue to input commands without receiving explicit feedback. We developed an experimental device with two armbands to sense three-dimensional pressure applied to the skin. Sensing tangential force on uncovered skin without haptic obstacles has not previously been achieved. SenSkin is also novel in that quantitative tangential force applied to the skin, such as that of the forearm or fingers, is measured. An infrared (IR) reflective sensor is used since its durability and inexpensiveness make it suitable for everyday human sensing purposes. The multiple sensors located on the two armbands allow the tangential and normal force applied to the skin dimension to be sensed. The input command is learned and recognized using a Support Vector Machine (SVM). Finally, we show an application in which this input method is implemented.