組み込み型カメラによる把持動作の計測
Measuring Grasp Posture Using an Embedded Camera
2017
柏木直諒,杉浦裕太,宮田なつき,多田充徳,杉本麻樹,斎藤英雄
Naoki Kashiwagi, Yuta Sugiura, Natsuki Miyata, Mitsunori Tada, Maki Sugimoto, Hideo Saito
[Reference /引用はこちら]
Naoki Kashiwagi, Yuta Sugiura, Natsuki Miyata, Mitsunori Tada, Maki Sugimoto, Hideo Saito, Measuring Grasp Posture Using an Embedded Camera, The First International Workshop on Human Activity Analysis with Highly Diverse Cameras (HDC2017), IEEE, 42-47, March 24-31, 2017, Santa Rosa, CA, USA. [DOI]
柏木直諒,杉浦裕太,宮田なつき,多田充徳,杉本麻樹,斎藤英雄,組み込み型カメラによる把持動作時の人体手形状3D復元,特集論文「映像表現とコンピュータグラフィックス」(研究速報),映像情報メディア学会論文誌,Vol.71,No.11,J283-J286,2017-11.[DOI][ITE_handsensing]
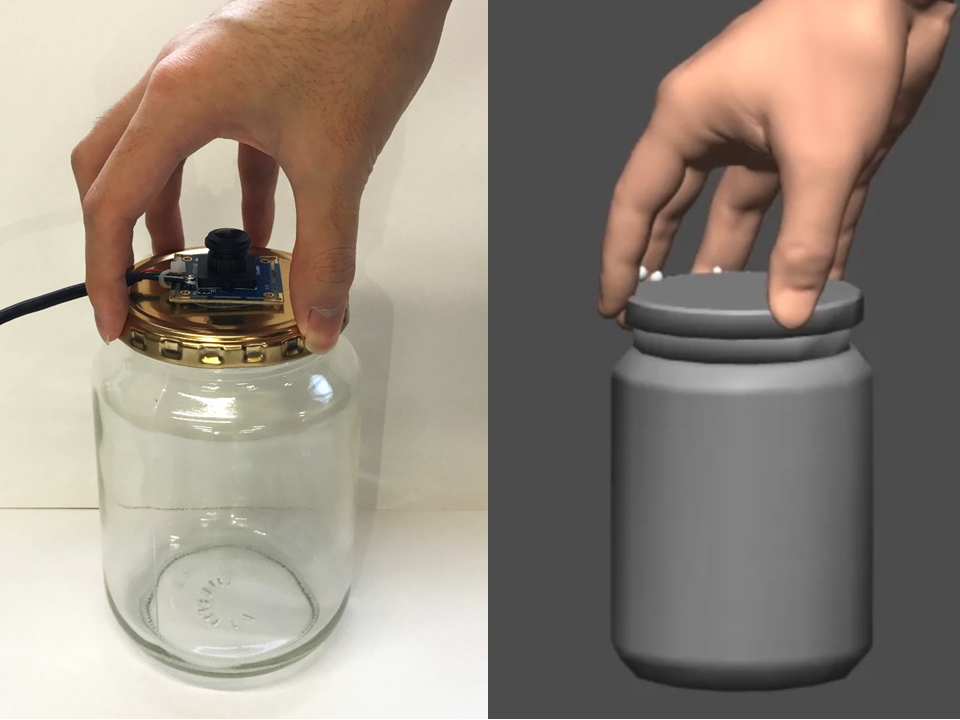
本研究では、物体に対する人間の把持姿勢を3D復元するシステムを提案する。ペットボトルやビンといった筒状の物体の蓋の上面に魚眼レンズを装着したカメラを付与し、肌色抽出やセグメンテーションといった画像処理を加えて指を認識する。取得した指位置をデジタルハンドモデルと組み合わせることで手全体の位置姿勢を復元する。本システムは、日用品の利用状況の計測に基づく製品改良や、スポーツのトレーニングに活用できる。
This paper proposes a measurement system for grasping postures using a fisheye camera. We attached a fisheye camera to the cap of a cylindrical object, such as a jar or a bottle. The fisheye camera was used to determine the position of the fingertips in 3D via image processing. The grasping posture utilized when opening or closing a jar or a bottle was then reconstructed. If an object, a model of a hand and the grasp type are given, it is possible to estimate the grasping posture of the whole hand, even using partially captured data. Preliminary experimental results show that the system is able to reconstruct the grasping posture of various users.