単眼カメラを用いた握力計測に向けた基礎検討
Estimation of Grip Strength using Monocular Camera for Home-based Hand Rehabilitation
2019
松本渚紗,藤田浩二,杉浦裕太
Nagisa Matsumoto, Koji Fujita, Yuta Sugiura
[Reference /引用はこちら]
Nagisa Matsumoto, Koji Fujita, Yuta Sugiura, Estimation of grip strength using monocular camera for home-based hand rehabilitation, SICE Journal of Control, Measurement, and System Integration, Vol.14, No.1, Pages 1-11. [DOI]
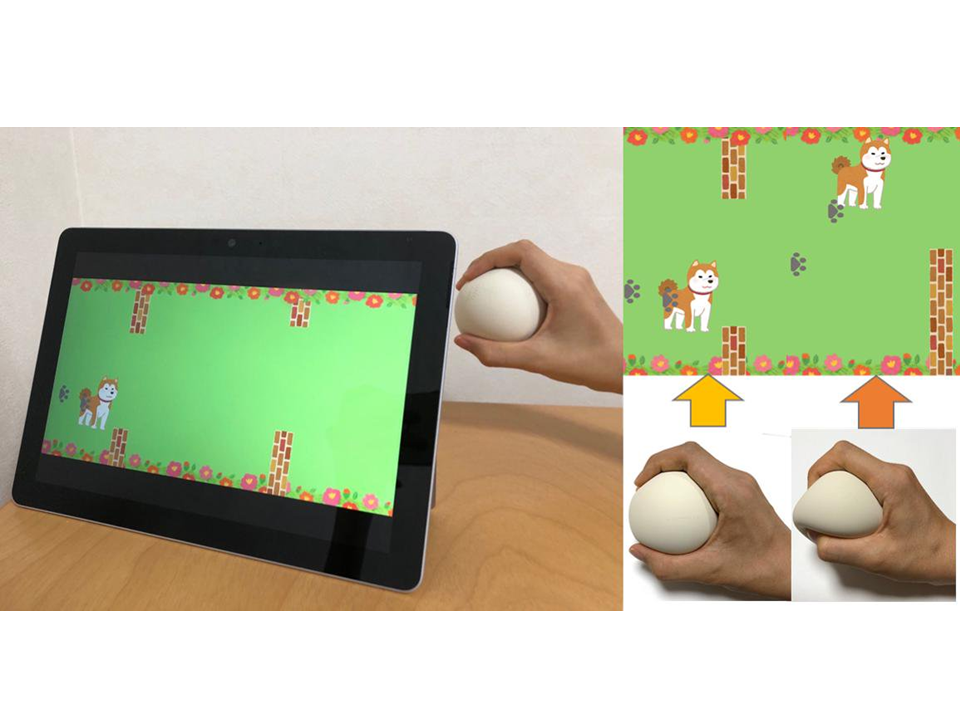
握力は上肢筋力だけでなく身体の状況を簡便に評価する指標であり、定期的な計測は自身の健康状態を把握するために重要である。しかし握力の計測には専用の機器が必要であり、これは一般家庭に普及されていないため日常的に握力を計測することは難しい。そこで本研究では、単眼カメラを用いて柔軟なボールを把持しているときの空気圧を推定し、握力を計測できるか検討する。撮影された二次元画像から画像処理で手指関節角度を計測し、重回帰分析にてボールの空気圧を推定する。実験の結果、手指の関節角度とボールの空気圧およびボールの空気圧とかかる力にはそれぞれ相関があるとわかった。
Grip strength exercises are commonly used rehabilitation methods for recovery of hand function. They are easy to perform even without the direct support of a healthcare professional. However, without objective feedback, the patient may not be fully engaged in the rehabilitation process. To solve this problem, we developed a system for measuring grip strength in real time using a soft ball and a monocular camera. The system estimates the grip strength using the modeled relationship between the finger joint angles extracted from the camera image and the person’s grip strength. A patient can get the feedback as numbers or movements displayed on the screen. Experimental results showed that there is a correlation between the finger joint angles and the air pressure of a ball when squeezed. The average estimation error was 16.1hPa, and the average measurement range was 100-230 hPa. The estimation error was about 12 % of the measurement range. They also showed that there is a correlation between the air pressure of a ball and the applied force.